Compliant End Effector
The compliant end effector project was started as apart of a Lunar Rover Research program directed by professor Serdar Kaylay from the Toronto Metropolitan University.
The key concept behind the design of this end effector is to enable robots to achieve dexterous control and cooperation autonomously. Hence the compliance became a crucial requirement to provide flexible yet precise object manipulation in unstructured space environments.
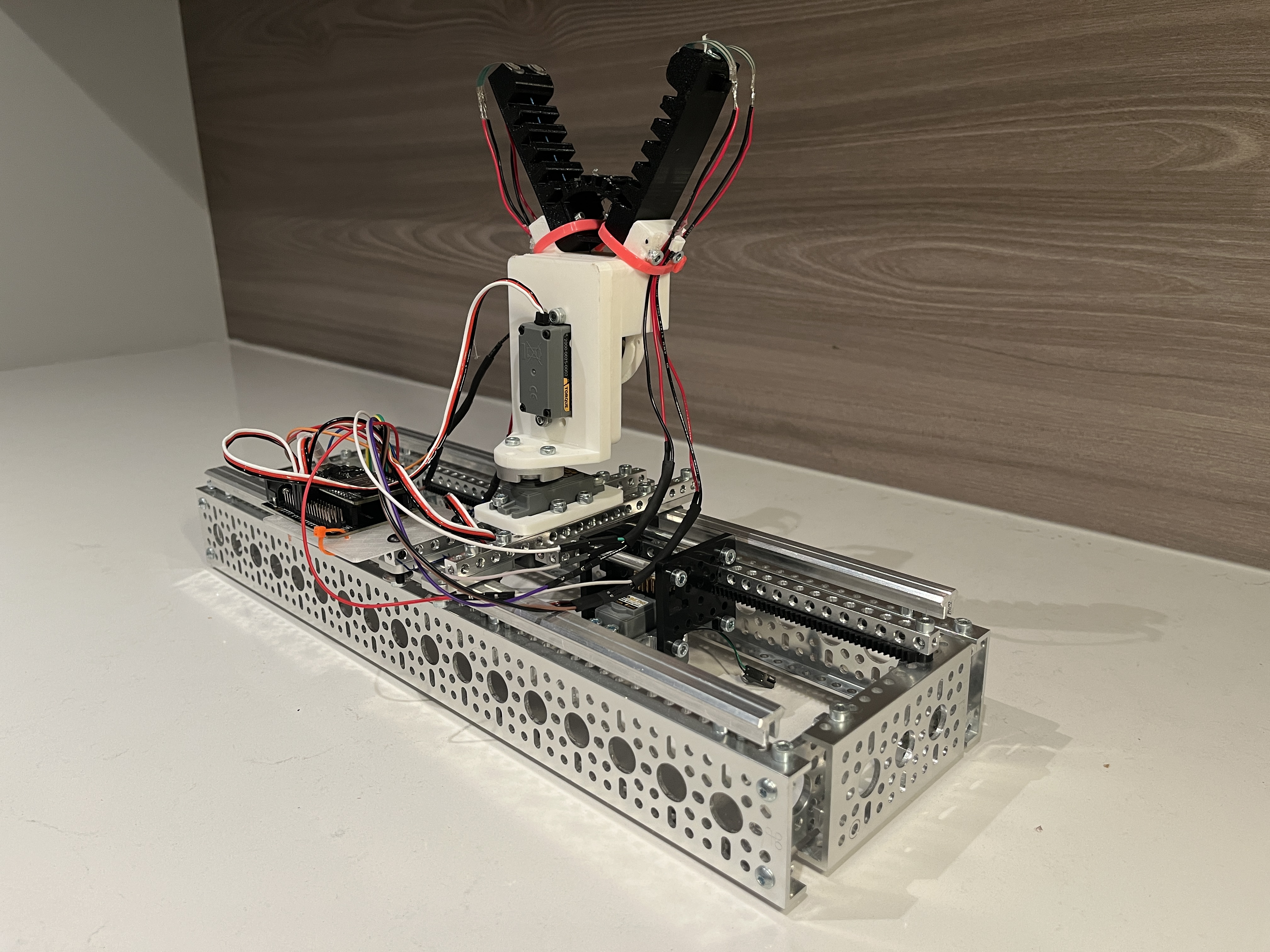
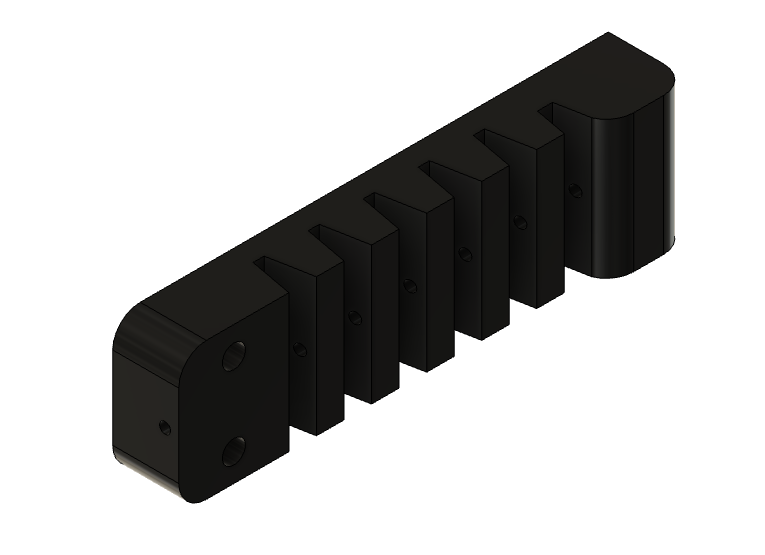
The design of the end effector is quite simple. Essentially, the end effector is a claw that consists of two compliant fingers which are string driven through a pulley. The fingers 3D printed with TPU with adjusted slot geometries to ensure its compliance. The trapezoidal shape provided more rigidity to the claw when it is compressed and the last slot was thickened to create more of a pinching movement. Surgical tubing were then used to hold the fingers open.
Two Force Sensitive Resistors (FSRs) were then mounted on each finger to measure the pressure that each finger experienced when controlling an object. The entirety of the claw was then placed on a wrist and linear slider system that provided linear movements and vertical rotational movements.


The data from the FSRs are sent into an ESP32 Dev Module which also powers the three servos with one controlling the wrist, one controlling the linear slider, and one for controlling the end effector. Then through a PD control system, the end effector simulated dexterous manipulation of an object whenever there was outside force applied into the object.
unsigned long currentTime = millis();
int topLeftReading = analogRead(topLeft); // Read the value from FSR connected to A0
int topRightReading = analogRead(topRight); // Read the value from FSR connected to A1
int bottomLeftReading = analogRead(bottomLeft); // Read the value from FSR connected to A2
int bottomRightReading = analogRead(bottomRight); // Read the value from FSR connected to A3
// Calculate average readings for left and right sides
int leftAverage = (topLeftReading + bottomLeftReading) / 2;
int rightAverage = (topRightReading + bottomRightReading) / 2;
// Calculate error for slider (difference between left and right readings)
float error_slider = rightAverage - leftAverage + normaldiff_slider;
// Calculate error for wrist (difference between top and bottom readings)
float error_wrist_left = topLeftReading - bottomLeftReading;
float error_wrist_right = topRightReading - bottomRightReading;
// Combine wrist errors into a single control output
float error_wrist = (error_wrist_left - error_wrist_right) / 2 - normaldiff_wrist;
// Calculate derivative components
float derivative_slider = error_slider - previousError_slider;
float derivative_wrist = error_wrist - previousError_wrist;
// PID control for the slider
float pidOutput_slider = 0;
if (abs(error_slider) > threshold_slider)
{
pidOutput_slider = Kp_slider * error_slider + Kd_slider * derivative_slider;
currentSliderPosition += pidOutput_slider; // Adjust the current position by PID output
currentSliderPosition = constrain(currentSliderPosition, 0, 180); // Constrain to valid servo range
}
// PID control for the wrist
float pidOutput_wrist = 0;
if (abs(error_wrist) > threshold_wrist)
{
pidOutput_wrist = Kp_wrist * error_wrist + Kd_wrist * derivative_wrist;
currentWristPosition += pidOutput_wrist; // Adjust the current position by PID output
currentWristPosition = constrain(currentWristPosition, 0, 180); // Constrain to valid servo range
}
// Move the servos to the new positions
slider.write(currentSliderPosition);
wrist.write(currentWristPosition);
// Update previous errors for the next loop iteration
previousError_slider = error_slider;
previousError_wrist = error_wrist;
For next steps, the design can be tested with fingers that are 3D printed with different TPU materials to adjust its stiffness and sensitivity. Furthermore, the thickness in each slot of the finger can be adjusted to experiment the pinching motion that the fingers constitute. Lastly, a axis torque sensor can be mounted on the claw to be integrated onto an actual small scale rover for testing.
Here is the research paper related to this project.
Force-Sensitive Gripper for Autonomous Manipulation in Unstructured Space Environments Download End Effector (.STEP)